OpenSprinkler › Forums › Hardware Questions › DIY Kit Assembly Questions › SOLVED! Firmware flash OK, but LCD displays rectangle box & stations not working
- This topic has 11 replies, 3 voices, and was last updated 10 years, 11 months ago by
Ray.
-
AuthorPosts
-
August 8, 2015 at 6:19 am #39742
thisisitParticipantOK, I built a version 2.2 Open sprinkler. I successfully flashed the firmware 2.1.2 and I also successfully updated the firmware to 2.1.5 vis USB, I can hook up the network cable and I can see it’s IP address in my router’s admin page…. everything looked ok except the following:
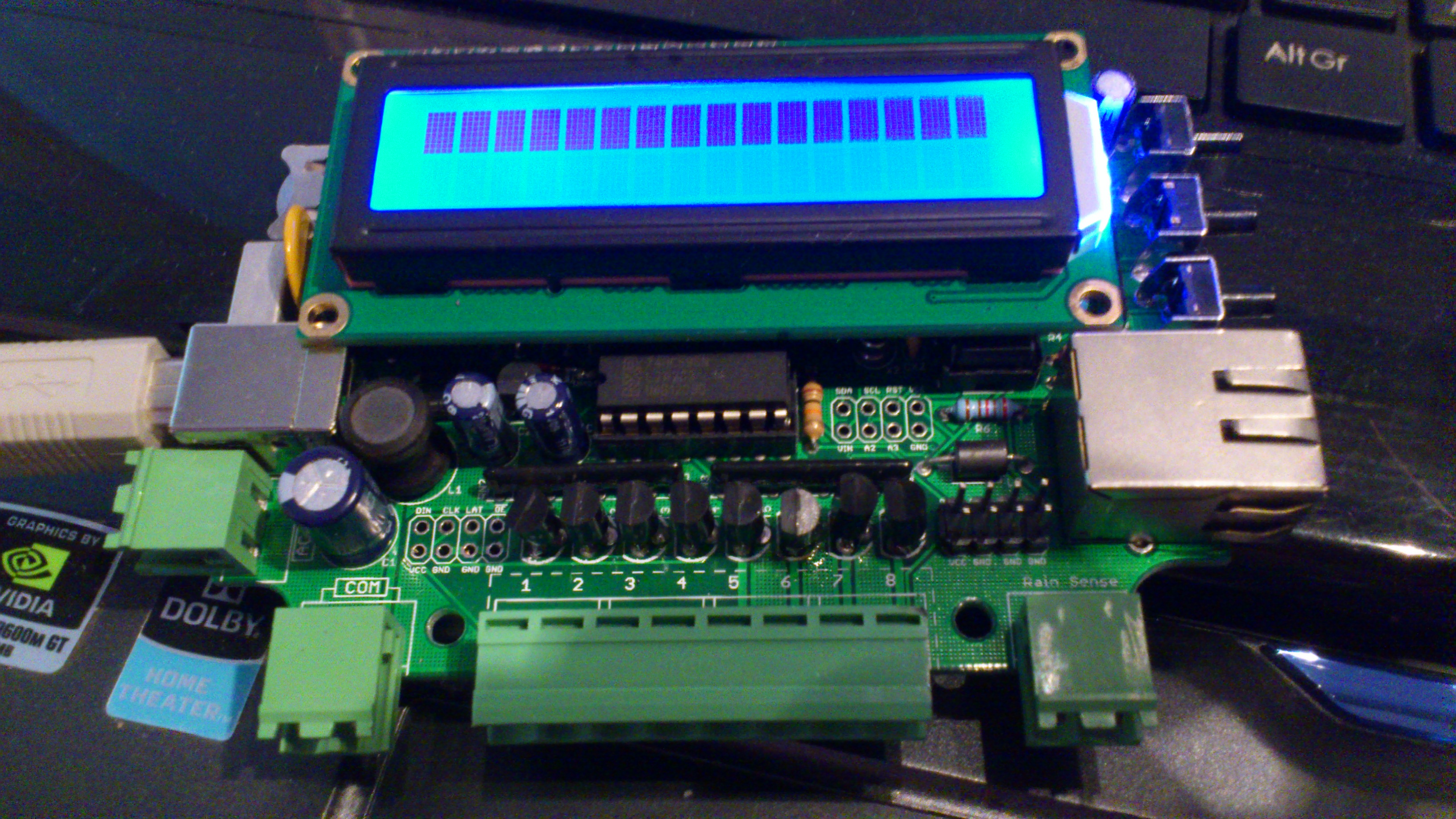
1: LCD second row is empty, first row is rectangle box, exactly like this: https://opensprinkler.com/wp-content/uploads/2015/05/DSC_0518.jpg
2: Tried to run the test program via web interface, I can see the web interface indicated the running station, but none of the stations were actually onWhat could be the problem?
I compared my board with the schematic many many times, no problem, also checked connections, no problem….
I can borrow an o’scope, can anyone please tell me how to trouble shooting?
thanks
August 8, 2015 at 3:40 pm #39753
thisisitParticipantI used this fuse setting:
avrdude -c usbtiny -p m644p -U lfuse:w:0xFF:m -U hfuse:w:0xD6:m -U efuse:w:0xFF:m
avrdude -c usbtiny -p m644p -B 1 -v avrdude: Version 5.10, compiled on Jan 19 2010 at 10:45:23 Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/ Copyright (c) 2007-2009 Joerg Wunsch System wide configuration file is "C:\WinAVR-20100110\bin\avrdude.conf" Using Port : lpt1 Using Programmer : usbtiny Setting bit clk period : 1.0 AVR Part : ATMEGA644P Chip Erase delay : 9000 us PAGEL : PD7 BS2 : PA0 RESET disposition : dedicated RETRY pulse : SCK serial program mode : yes parallel program mode : yes Timeout : 200 StabDelay : 100 CmdexeDelay : 25 SyncLoops : 32 ByteDelay : 0 PollIndex : 3 PollValue : 0x53 Memory Detail : Block Poll Page Polled Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack ----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- --------- eeprom 65 10 128 0 no 2048 8 0 9000 9000 0xff 0xff flash 33 6 256 0 yes 65536 256 256 4500 4500 0xff 0xff lock 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00 lfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00 hfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00 efuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00 signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00 calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00 Programmer Type : USBtiny Description : USBtiny simple USB programmer, http://www.ladyada.net/make/usbtinyisp/ avrdude: programmer operation not supported avrdude: Setting SCK period to 1 usec avrdude: AVR device initialized and ready to accept instructions Reading | ################################################## | 100% 0.02s avrdude: Device signature = 0x1e960a avrdude: safemode: lfuse reads as FF avrdude: safemode: hfuse reads as D6 avrdude: safemode: efuse reads as FF avrdude: safemode: lfuse reads as FF avrdude: safemode: hfuse reads as D6 avrdude: safemode: efuse reads as FF avrdude: safemode: Fuses OK avrdude done. Thank you.August 8, 2015 at 9:27 pm #39762
thisisitParticipantFrom what I found on internet, the default display mode is 1 row, that is why I see 1 row of black blocks. This means the LCD failed initialization. what could be wrong?
August 8, 2015 at 10:15 pm #39766
RayKeymasterHow did you update the firmware to 2.1.5? If you did it in command line, there is possibility that you may have uploaded the wrong firmware. Also, when you say ‘none of the stations is actually on’ did you connect actual solenoids to the stations or did you just use a multimeter to measure the output voltage?
August 9, 2015 at 12:19 am #39768
thisisitParticipantI updated to 2.1.5 via USB.
firmware 2.1.2 (direct flash using USBTiny) has the same issue, that is why I updated to 2.1.5, so I don’t think it is firmware issue.
for second question, I connected a light bulb, I have a OSPi around, when the station is on, the light bulb is on, but the light bulb stays OFF in my OS.
Could the IO port being damaged? I can borrow a O’scape, how to use it to debug the problem?also is there a simple HEX just test the LCD?
thanks
August 9, 2015 at 1:10 am #39771
SamerKeymasterJust to clarify, the first question was regarding the software not the medium. USB is the only way to update however software wise you may be using our firmware updater GUI or avrdude manually from the command line. If you are using the command line, you have to be sure to download the correct HEX for your hardware version otherwise it will flash and malfunction.
August 9, 2015 at 1:42 am #39773
thisisitParticipantHi Samer:
I updated to 2.1.5 via USB updater GUI software, so the USB part of the board is work, it can detect the board and update the firmware.
Also when I turn it on, I see top row are blocks, after a few seconds, the backlight is off (or dimmed), if I press any of the buttons (B1, B2, B3), LCD backlight will go back ON again, so PA port (at least PA0, PA1 and PA2 are working).
Since CH340 is working (I can update the firmware via GUI updater software), so TXD and RXD is working, which means PD0 and PD1 are working.
Also, ISP and network are working, which means PB7, PB6, PB5, PB4 are working.
None of above (CH340, network, ISP) use port C, so could port C being bad? Also PC1 and PC0 connects to EEPROM 24AA02E, so could 24AA02E gone bad?
August 9, 2015 at 1:56 am #39774
thisisitParticipantOK, I figured that 24AA02E should be working. Because I can change settings in Web interface, and power it off, then power it on again, the setting is preserved, thus the EEPROM is working.
August 9, 2015 at 1:58 am #39775
thisisitParticipantIf I updated a corrupted firmware then the Web interface shouldn’t work. Since the web interface works perfectly, so the firmware should intact.
August 9, 2015 at 2:19 am #39776
thisisitParticipantFor the above analysis, it seems all the ports are working correctly (at least partially).
I also checked each pin to GND, I found Pin 25 (PC6), Pin 41 (PB1) and Pin 43 (PB3) are grounded.
PB3 and PB1 are connected to 74HC595D, PC6 is connected to LCD, could these be the problem?
August 9, 2015 at 4:02 am #39778
thisisitParticipantOK, problem solved.
I soldered the EXT header, which shorted AVR’s Pin 25, 41, 43 to GND. These pins are used for LCD and stations, thus caused the problem.
My existing ATMEGA644P is damaged, (googled, seems if output pins are shorted to GND, they will be damaged).
Replaced a new ATMEGA644P, LCD is working and stations are working.Thanks all!
August 9, 2015 at 7:30 am #39779
RayKeymasterOK, that’s good to know. Thanks for reporting.
-
AuthorPosts
{kind=link}
- You must be logged in to reply to this topic.
OpenSprinkler › Forums › Hardware Questions › DIY Kit Assembly Questions › SOLVED! Firmware flash OK, but LCD displays rectangle box & stations not working